1.简介
本文档主要记录input子系统使用,我们通过驱动Linux上iic连接的手势识别传感器paj7620来展开。
(于2019年开发瑞芯微平台上使用)涉及到的驱动模块:
DTS设备树,input子系统, I2C模块,workqueue工作队列
2.传感器驱动
2.1 传感器数据结构
构造好传感器的数据结构,涉及到i2c模块,延时工作队列,input_device用来上报消息。
//paj7620传感器
struct gesture_sensor{
struct i2c_client *client;
struct delayed_work poll
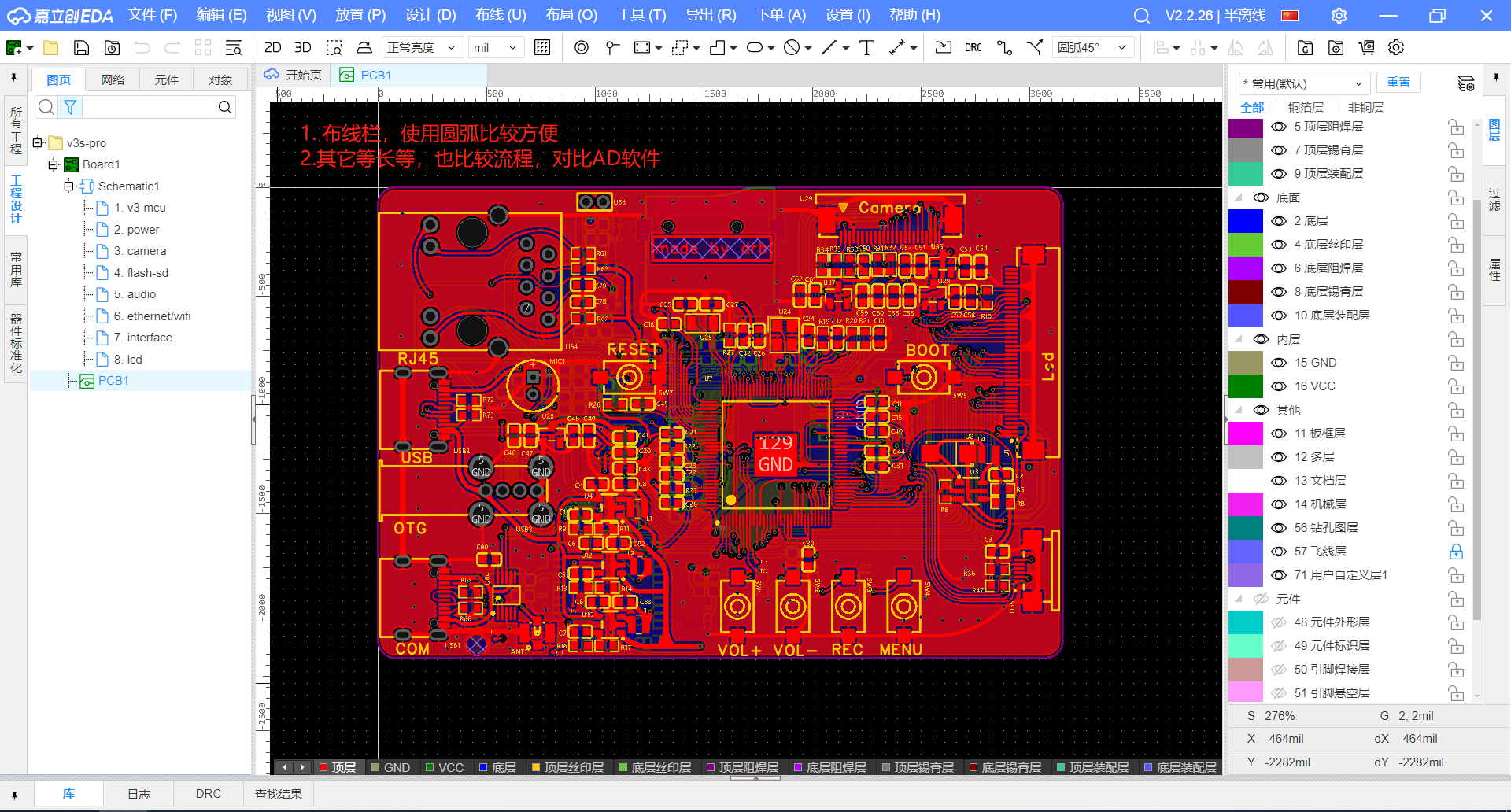
 圆弧走线,等长,这些性能其实还是不错(对比AD软件,CPU消耗确实友好不少)
圆弧走线,等长,这些性能其实还是不错(对比AD软件,CPU消耗确实友好不少)
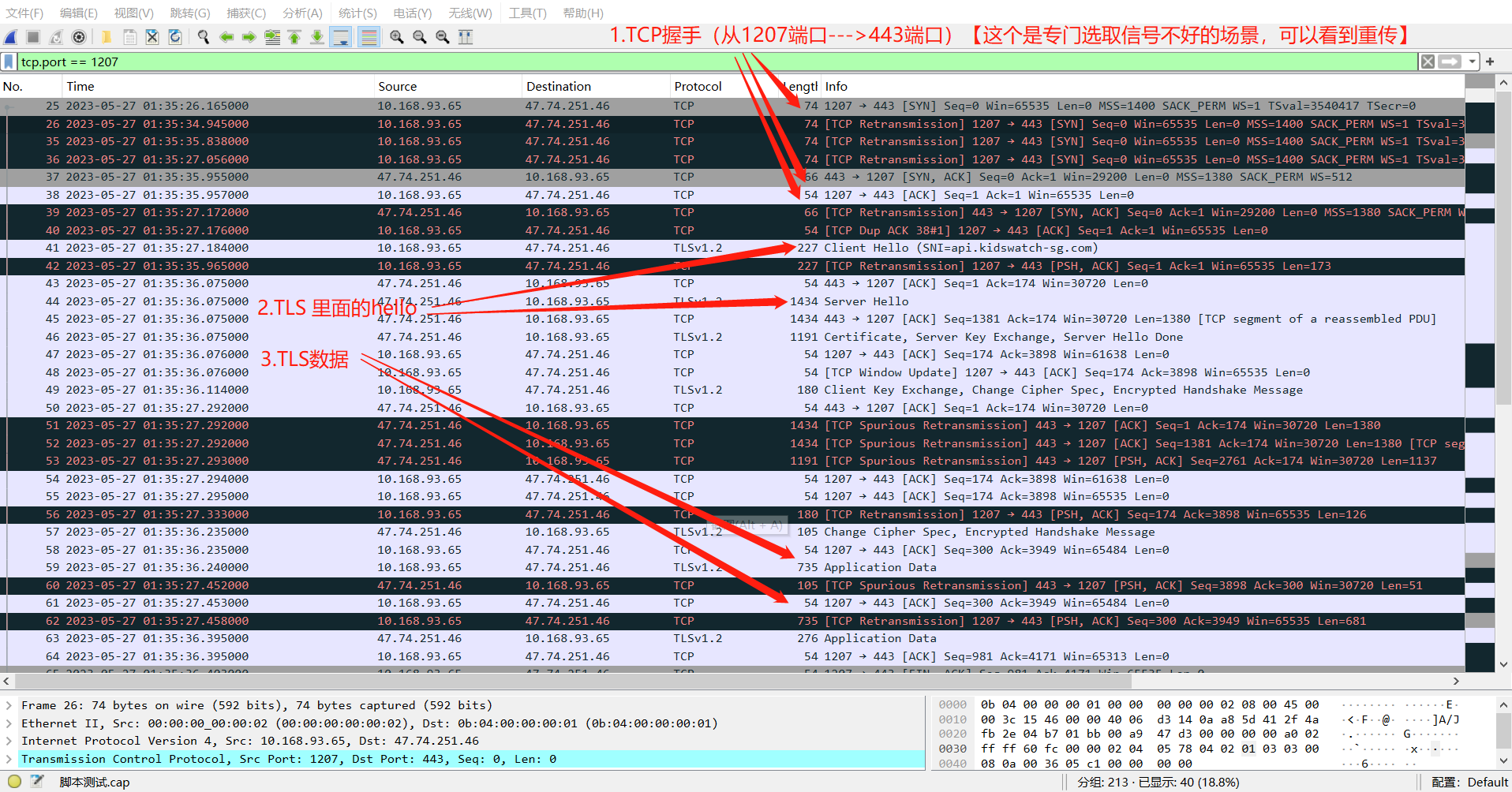 上面是TCP的三次握手,1207为客户端,建立的端口,443为服务端HTTPS的端口
1)SYN同步
1207--> 443
2)SYN,ACK
443--> 1207
3)ACK
1207--> 443 连接建立成功
上述过程信号较差(数据连接较不稳定,超时重
上面是TCP的三次握手,1207为客户端,建立的端口,443为服务端HTTPS的端口
1)SYN同步
1207--> 443
2)SYN,ACK
443--> 1207
3)ACK
1207--> 443 连接建立成功
上述过程信号较差(数据连接较不稳定,超时重