1.卡尔曼作用简述
卡尔曼滤波是一种递归的最优状态估计算法,用于传感器数据融合、导航系统和机器人 领域,核心思想,通过预测-更新循环,结合系统动态模型和当前测量值,对系统状态 做出最优估计。
2.卡尔曼核心步骤
2.1 预测步骤
状态预测 误差协方差预测
2.2 更新步骤
卡尔曼增益计算 状态更新 误差协方差更新
3.关键性参数
3.1 初始化状态估计X
系统初始状态的给定值(猜测),对于心率之类的,例如给定一个正常值。 若不准确,较大的初始化误差协方差,可使滤波器快速收敛。
3.2 初始误差协方差P
初始话状态估计的不确定性,值越大越不确定。 如果是初始化状态已经很明确,可以设置较小值,如果不确定则较大值
3.3 过程噪声协方差Q
系统动态模型的不确定性 Q较大,允许模型更快速适应变化,但是可能存在放大噪声 Q较小,强制轨迹平滑,有利于抑制噪声,但是可能滞后于真实值。
3.4 测量噪声协方差R
传感器测量误差的统计(例如:本文使用用gps轨迹,则和gps定位误差相关) 较大,降低对测量值的信任程度,更加依赖于预测值 较小,更信任测量值,滤波结果更加接近原始数据
3.5 状态转移矩阵F
描述系统状态如何随时间演变(如匀速运动、匀加速运动) 注意,必须要准确反应系统动态特性,否则滤波效果变差
4.调试指南
光凭参数,只需要了解参数控制内容,在熟悉各个参数获取 例如初始化状态获取,测量误差、对过滤结果预期是平滑还是反应真实做出 预判。比较重要是建立一个可以动态观察调试的平台。
5.实际效果
必须要建立一个可视化数据,这样才能方便于调试,各种参数的实际效果,如下,我们
以gps轨迹做一个扩展卡尔曼滤波效果评估(二维卡尔曼)。
通过python写一个可视化界面,直观看轨迹情况,方便进行分析。
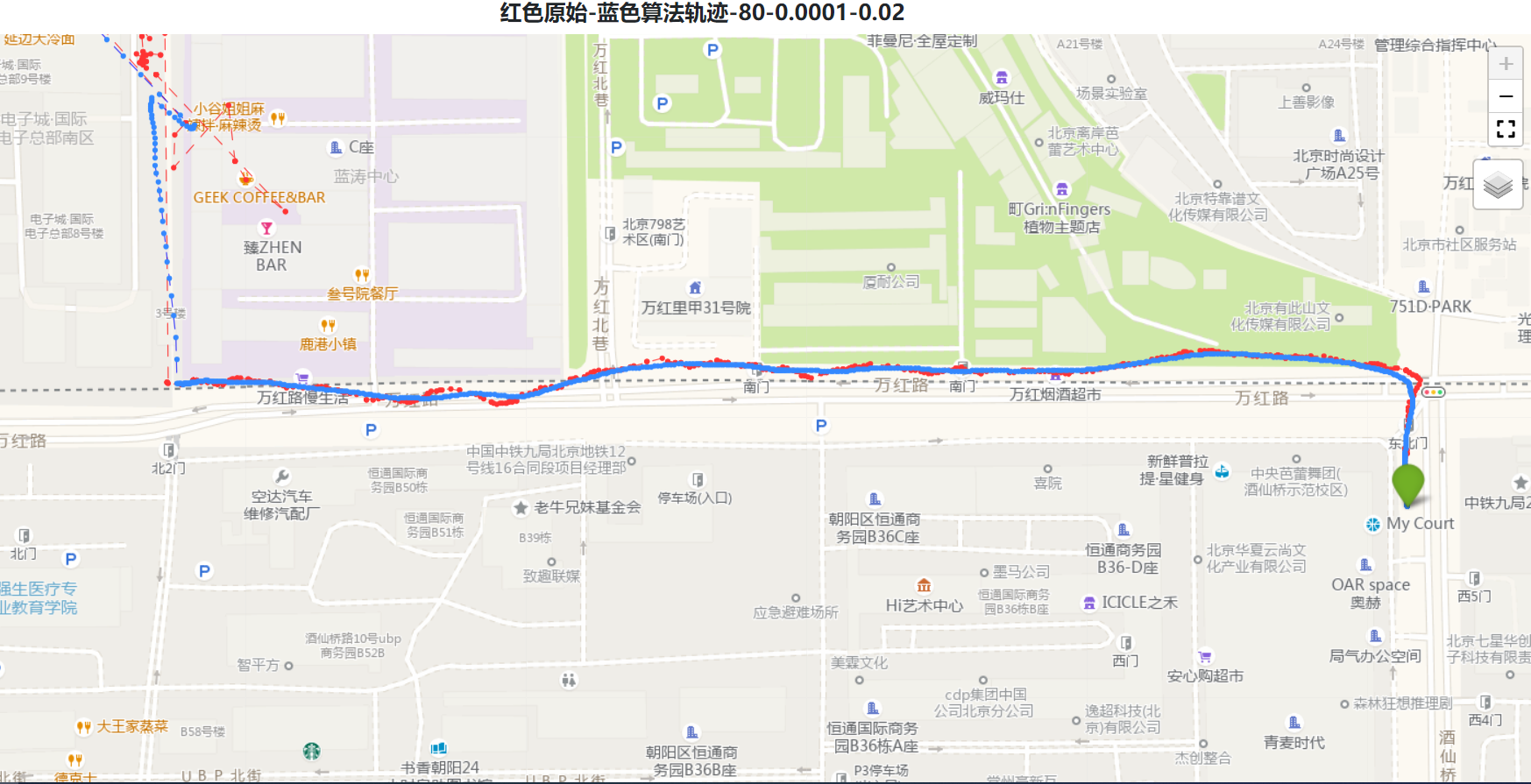
 从上面明显可以看到,选择越相信传感器,过滤倾向于原始(但是导致了gps部分漂移到
马路对面的轨迹),显然越相信传感器,轨迹不友好。
从上面明显可以看到,选择越相信传感器,过滤倾向于原始(但是导致了gps部分漂移到
马路对面的轨迹),显然越相信传感器,轨迹不友好。
您还没有登录,请您登录后发表评论。