1.卡尔曼作用简述
卡尔曼滤波是一种递归的最优状态估计算法,用于传感器数据融合、导航系统和机器人 领域,核心思想,通过预测-更新循环,结合系统动态模型和当前测量值,对系统状态 做出最优估计。
2.卡尔曼核心步骤
2.1 预测步骤
状态预测 误差协方差预测
2.2 更新步骤
卡尔曼增益计算 状态更新 误差协方差更新
3.关键性参数
3.1 初始化状态估计X
系统初始状态的给定值(猜测),对于心率之类的,例如给定一个正常值。 若不准确,较大的初始化误差协方差,可使滤波器快速收敛。
3.2 初始误差协方差P
初始话状态估计的不确定性,值越大越不确定。 如果是初始化状态已经很明确,可以设置较小值,如果
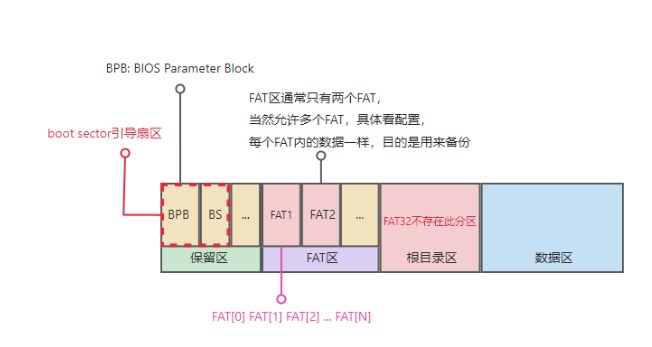
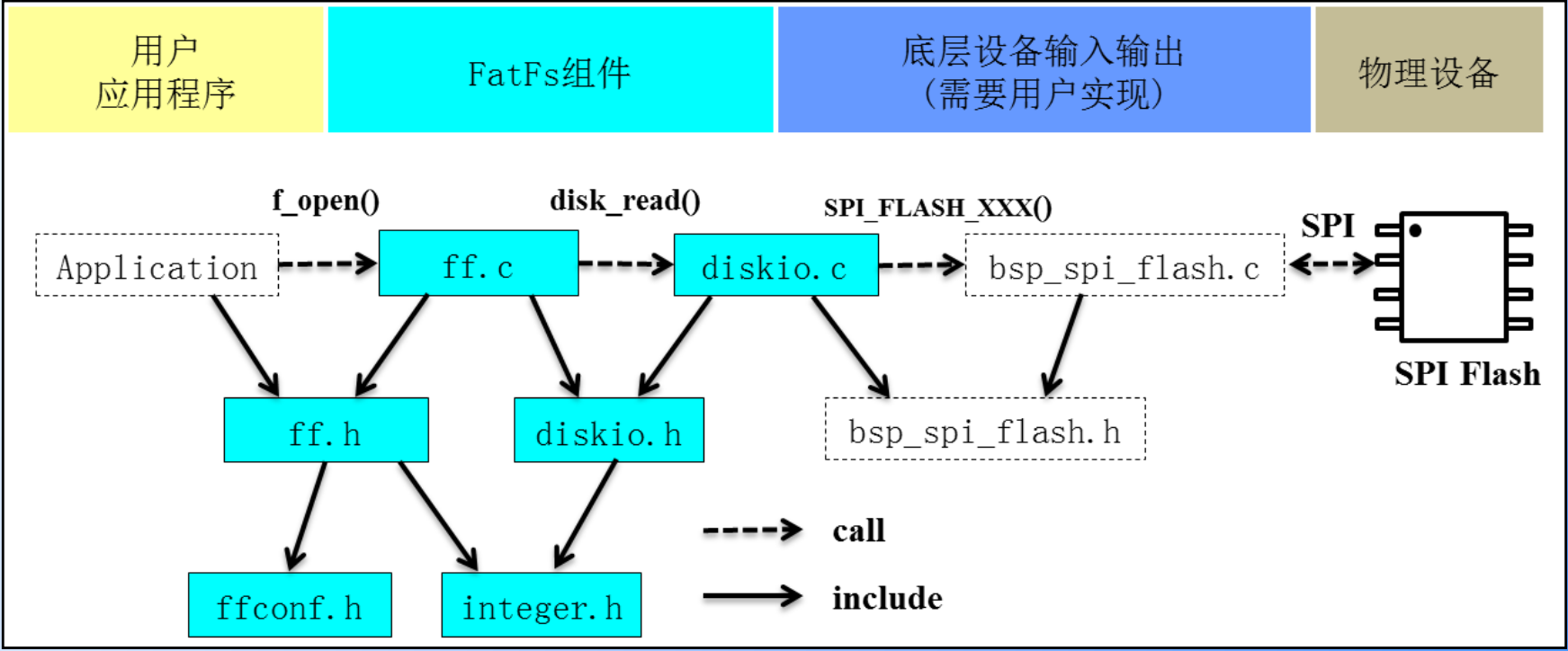 fatfs文件系统上布局
fatfs文件系统上布局